REHABILITATION ENGINEERING AND ROBOTICS LABORATORY
This Lab is related to the Neurorehabilitation Robotics and Engineering Group at the Department of Health Science and Technology.
Head of Laboratory: Lotte N. S. A. Struijk, Associate Professor (naja)
AIM
The work in the Laboratory integrates the knowledge from biological control methods and rehabilitation with the most advanced engineering, robotics and computer techniques with the goal of designing rehabilitative, assistive, robotic and therapeutic technologies for individuals with sensory-motor disabilities.
 The research in the Laboratory encompasses human and clinical experimentation in the design and implementation of bio-interface and control technologies for robotics and assistive devices, such as Tongue based control of assistive robotic arms and exoskeletons, brain based control of lower limb exoskeletons and brain, myo and tongue hybrid robotic interfaces. Further, the research focuses on system design of novel robotic devices such as bio-controlled and bio-inspired soft-exoskeletons and myo-electric and multimodal control of prosthetics and assistive robotics.
The research in the Laboratory encompasses human and clinical experimentation in the design and implementation of bio-interface and control technologies for robotics and assistive devices, such as Tongue based control of assistive robotic arms and exoskeletons, brain based control of lower limb exoskeletons and brain, myo and tongue hybrid robotic interfaces. Further, the research focuses on system design of novel robotic devices such as bio-controlled and bio-inspired soft-exoskeletons and myo-electric and multimodal control of prosthetics and assistive robotics.
The Laboratory has currently several projects in the domain of advanced robotics, bio-exoskeletons, human machine interfacing, semi-automation and virtual reality in rehabilitation with the emphasis on neurorehabilitation. Further, the Laboratory investigates the application of Bio-mechanics and Bio-Mechanic modeling in the design of exoskeletons specifically targeting individuals with disabilities, and how robotics can improve sports activities for 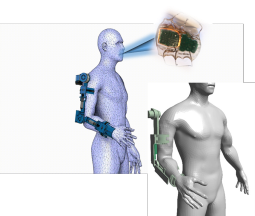 severely disabled individuals, e.g. facilitation of drone sports for individuals with tetraplegia.
severely disabled individuals, e.g. facilitation of drone sports for individuals with tetraplegia.
Further, the work includes collaboration with users, clinicians, industry and the assessment of the use of such robotic technologies in rehabilitation, e.g. studies of neuroplasticity induced by lower limb exoskeletons.
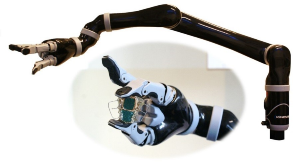
In the laboratory several robotic devices and bio-interfaces are available such as the JACO2 robot from Kinova Roboics, the SMART HAND, Myo-electric prosthesis a powered wheel chair, Carbon glove/SEM glove, BCI recording equipment, EMG recording equipment, Cameras etc. for computer vision, Virtual Reality equipment, the iTongue and exoskeletons designed in the related EXOTIC lab.
MAIN RESEARCH AREAS
- Development of multimodal robotic interfaces
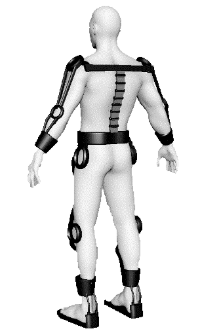
- Development of bio-controlled exo-skeletons, e.g. soft gloves and full arm exos such as the EXOTIC: VIDEO: https://www.youtube.com/watch?v=L-jhidyzWiM
- Development of rehabilitation robotics https://vbn.aau.dk/da/publications/a-novel-semg-triggere
 d-fes-hybrid-robotic-lower-limb-rehabilitati robot interface
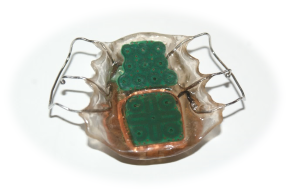
d-fes-hybrid-robotic-lower-limb-rehabilitati robot interface - Development of the intraoral inductive tongue computer/robot interface, the iTongue incorporating 18 inductive sensors. The aim is to enable people with severe sensory-motor disabilities to control prosthetic, therapeutic and assistive devices by volition. The studies include tongue based control systems http://tks-technology.dk/index.php/products/#Itongue
- Development of Tongue based interfaces and control methods for Assistive robotic arms – Video
- Bio-interfacing for exoskeletons, e.g. BCI control of lower limb exoskeletons
- Development of methods to study effect of therapy and central nervous system reorganization associated with therapeutic used of prosthetics and robotics.
- Development of input systems to control assistive and robotic devices
- Development of multimodal/hybrid bio-robotic semi-automated control methods
Related Publications
https://vbn.aau.dk/en/persons/100399/publications/
People in the lab
- Lotte N. S. A. Struijk, Associate Professor (naja)

- Mads Jochumsen, Associate Professor from Neural engineering and neurophysiology group - BCI control in the MultiRob project: Multimodal control of assistive robotic arms for severely disabled individuals
- Mikkel Thøgersen, Postdoc – System integration and Experimentation in the EXOTIC : Assistive personal robotics platform with an exoskeleton using the tongue for intelligent control as a use case
- Daniel Johansen, Postdoc: Myo and Tongue based hybrid of the SMARTHAND, and in the MultiRob project where it is combined with semiautonomous control
- Mohammed Hamdy Abdelhafiz, PhD student: Bio-robotic soft hand exoskeleton
- Kasper Kunz Leerskov, PhD student: BCI driven rehabilitation robot, Plasticity induced by Robotic-rehabilitation and Research Assistant in the Eurostar project: EMG triggered FES hyrbrid robotic rehabilitation robot
- Mostafa Mohammadi, PhD student – Tongue control in the EXOTIC: Assistive personal robotics platform with an exoskeleton using the tongue for intelligent control as a use case
- Rasmus Leck Kæseler, PhD student – BCI/Tongue in the MultiRob project: Multimodal control of assistive robotic arms for severely disabled individuals
- Ásgerdur Arna Pálsdóttir, PhD student, Tongue/Remote control in the MultiRob project: Multimodal control of assistive robotic arms for severely disabled individuals.
- Close collaboration with people from the EXOTIC project focusing on an bio-based exoskeleton arm in the Biorobotics Laboratory: 4 PhD students and a Postdoc.
Visiting
- 2020 Kirstina Beatrice Persson Vestersøe, from DTU- Technical University of Denmark. Internship: A hybrid soft/rigid forearm exoskeleton.

- 2020 Ana Sofia Santos Cardoso, ERASMUS student from Universidade do Porto, Protugal. Internship: BCI based control of assistive robotic arms
- 2019 Arthur Camouseigt, ERASMUS student from École Nationale Supérieure de Techniques Avancées (ENSTA
- ParisTech), France, Internship: Advanced tongue based drone control for individual with tetraplegia.
- 2019 Enric Casanova, ERASMUS student from Université Paris Descartes - Faculté des Sciences Fondamentales et Biomédicales, France, Internship, Master thesis project: The effect of a reduced range of shoulder abduction on the wrist kinematics - a design parameter for under-actuated arm exoskeletons.
- 2018 Salheddine Ayad, Visiting PhD student from University of Sidi-Bel-Abbes, Algeria: 3D Interactive Robotic Rehabilitation System
KEY COLLABORATORS
- BioRobotics Institute of the Scuola Superiore Sant'Anna, Pisa, Italy

- Neurorehabilitation Engineering, Department of Bioengineering, Imperial College London, London, UK
- TKS A/S, Denmark (Spin-off company from the Laboratory, developing tongue based control systems)
- Life Science Robotics
- TA. Service A/S
- LT-automation,
- Aalborg University Hospital
- Research Department, Spinal Cord Injury Centre of Western Denmark
- Clinic for Spinal Cord Injury, Neurocentret Rigshospitalet
-
RYK
PARTICIPATION IN MAJOR RESEARCH PROJECTS
- H2020 Eurostars project: ROBERT-SAS: sEMG triggered FES-Hybrid Robotic Lower Limb Neuro-Rehabilitation System
- FTP Grant: MultiRob poject: Multimodal control of assistive robotic arms for severely disabled individuals
- EXOTIC: EXO with Tongue based Intelligent Control, Strategic Interdisciplinary project at Aalborg University
- SMARTHAND: The Smart Bio-adaptive Hand Prosthesis,
NMP4-CT-2006-0033423 (FP6 Strep project);
Project coordinator name: Prof. Thomas Laurell, Lunds Universitet, Lund, Sweden;
Project duration: 3 years (2006-2009)
LOCATION
Fredrik Bajers Vej 7D, D3-108